Исследователи объединили исследования с участием реальных насекомых и роботов-роботов, чтобы лучше понять, как они ощущают силу в своих конечностях во время ходьбы, что дает новое представление о биомеханике и нейронной динамике насекомых и дает информацию о новых приложениях для крупноногих роботов. Они представили свои выводы на конференции, посвященной столетию SEB в 2023 году.
Колокольчатые сенсиллы (CS) — это силовые рецепторы, обнаруженные в конечностях насекомых, которые реагируют на стресс и напряжение, предоставляя важную информацию для управления передвижением. Аналогичные силовые рецепторы существуют у млекопитающих, известных как сухожильные органы Гольджи, что позволяет предположить, что понимание роли силовых сенсоров у насекомых может также дать новое представление об их функциях у позвоночных, таких как человек.
«Я изучаю роль датчиков силы у ходячих насекомых, потому что эти датчики имеют решающее значение для успешного передвижения», — говорит доктор Щецински, доцент кафедры машиностроения и аэрокосмической инженерии в Колледже инженерии и минеральных ресурсов Статлера при Университете Западной Вирджинии, США. «Обратная связь, которую они обеспечивают, имеет решающее значение для правильного передвижения. осанка и координация движений.»
Преимущества построения роботизированных моделей по сравнению с компьютерными включают в себя более реалистичное моделирование трения между движущимися частями и включение задержек для отправки нейронных сигналов. Преимущество роботизированных конечностей также заключается в том, что они могут записывать отправку и прием каждого отдельного сигнала и результирующие механические действия, что невозможно для животных.
«Ходьба по своей сути является механической задачей, поэтому понимание нейронного контроля ходьбы требует одновременного изучения механики и нейронного контроля», — говорит доктор Щецински. «Правильно функционирующие шагающие роботы могут послужить прототипами машин, которые могли бы помочь людям заниматься сельским хозяйством в экстремальных условиях, исследовать другие планеты или гулять по лесам, чтобы следить за своим здоровьем».
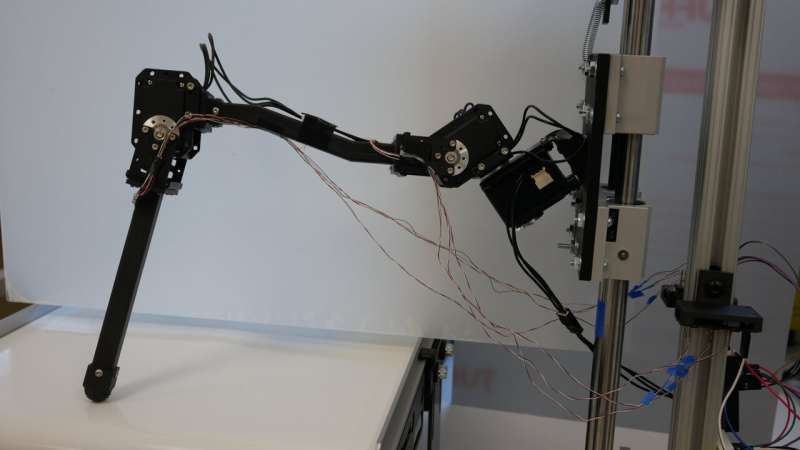
У доктора Щецински есть два основных исследовательских робота: первый — биомиметический робот на основе плодовой мушки (Drosophila melanogaster), которая ходит на шести ногах, что позволяет команде получить полную картину того, как кампаниформная сенсилла отслеживает силы во время ходьбы. Другой робот — одноногий, что позволяет упрощенно имитировать сенсорные ощущения одной ноги насекомого во время ходьбы.
Доктор Щецински также исследует роль CS у реальных насекомых, изолируя их конечности и контролируя сенсорные пути с помощью электродов при приложении различных усилий. Эти записанные сенсорные сигналы затем используются для разработки моделей роботизированных ног.
«Записывая их реакцию на множество различных сигналов, мы можем нарисовать более четкую картину того, как они преобразуют силы в нейронную активность», — говорит доктор Щецински. «Мы используем множество различных стимулов, потому что CS очень динамичны и всегда адаптируются к приложенным силам».
Исследование доктора Щецински выявило очень сильную корреляцию между их настоящими насекомыми и роботизированными аналогами. «Мы обнаружили, что для каждого вида насекомых, который мы проверяем, наша модель одинаково хорошо подходит для описания того, как CS преобразует силы в нейронную активность», — говорит доктор Щецински. «Это говорит о том, что органы каждого вида в целом функционируют одинаково».